团队博士生李永江在《IEEE Transactions on Instrumentation & Measurement》期刊发表基于RTK GNSS,MEMS 惯性测量单元,里程计,激光多传感器融合的铁路轨道不平顺检测系统研究成果。
铁路轨道不平顺的准确评估对于确保运营安全和乘客舒适度具有关键作用,特别是在高速铁路。传统的静态监测方法,如依靠全站仪的绝对测量小车系统,已被证明是低效的。另一方面,像全球导航卫星系统/惯性导航系统(GNSS/INS)组合系统这种相对测量小车系统提供了很高的操作效率,但与导航级惯导成本较高。在本研究中,我们介绍了一种以相对检测小车为中心的新型多传感器融合系统。这种创新的方法可以显著降低设备成本,同时提高不平顺检测的准确性。该系统的核心组件包括RTK差分定位系统,MEMS惯性测量单元,一个里程计和两个激光传感器。零速校正(ZUPT)、Ranch-Tung-Striebel平滑(RTS)、非完整约束(NHC)、里程计校准(OC)和先验知识(PK)方法用于提高铁路并顺测量的效率和精度。大量的铁路不平顺测试结果证明了系统的良好性能。本研究最终提供了轨距0.2mm、水平1.0mm、三角坑0.7mm、轨向0.5mm、高低0.5mm的钢轨不平顺检测精度。
论文近期以“Multi-Sensor Fusion for Railway Irregularity Inspection System :Integration of RTK GNSS, MEMS IMU”为题,发表在SCI期刊《IEEE Transactions on Instrumentation & Measurement》。团队博士生李永江为论文第一作者,通讯作为其导师赵齐乐教授,合作者包括团队郭靖教授、方荣新教授和郑佳伟博士。该项研究受到了国家自然科学基金(42030109)等课题资助。
论文主要内容
一、铁路不平顺检测系统组成
本研究采用了多种多传感器设备,包括一个MEMS IMU、一个里程计、两个激光传感器和一个GNSS OEM板。GNSS OEM以10hz的频率提供观测数据样本,而MEMS IMU以200hz的采样率提供传感器输出。里程计测量车辆的前进速度,而激光传感器用于轨道轨距测量。以“Y”型车体作为轨道检测平台,检测设备、供电设备均被放置在车体的腔体内,MEMS IMU安装在车体中心,两个激光传感器对称安装在IMU两侧扫描左右钢轨内侧。
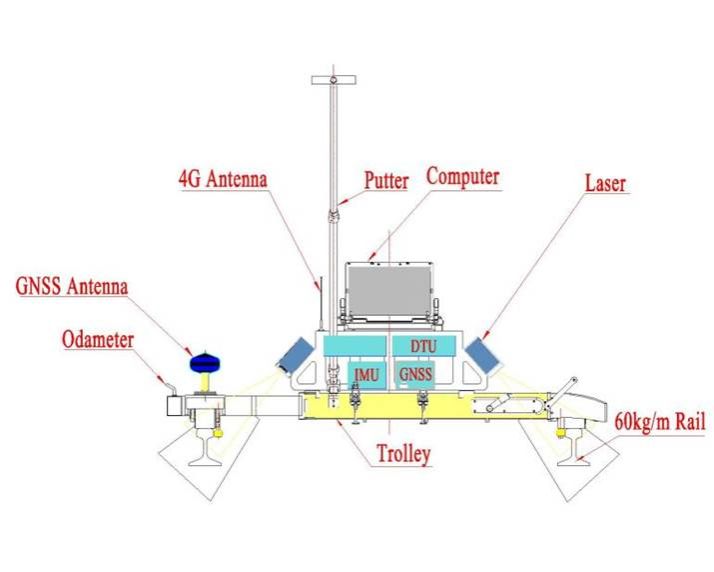
图 1.多传感器融合轨道不平顺检测系统组成。
二、方法与模型
不同于与以往的方法,我们基于已建立的GNSS/INS/ODO组合模型,将里程计刻度误差和IMU安装角度偏差、时间不同步误差纳入卡尔曼状态模型。此外,我们采用了一个里程计校准模型(OC)来精确地计算里程表刻度误差和安IMU装误差角。

在GNSS/INS/ODO组合模型的基础上,鉴于小车在轨道上的运动特性,加入了零速校正(ZUPT)、非完整性约束(NHC)、RTS正反向平滑、铁路先验知识等辅助方法,进一步提高导航结果精度。
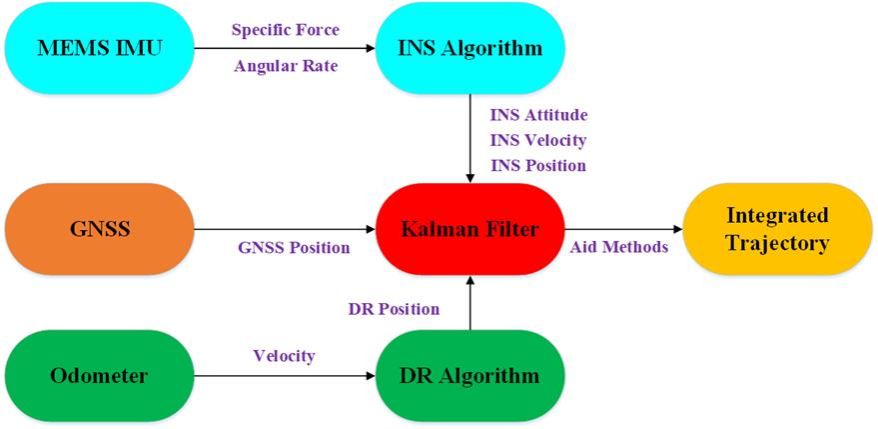
图 2.算法融合数据处理流程图
三、实验与结果分析
实验选取一段480米长的轨道作为实验对象,在同一条轨道上进行多次往返测试,钢轨线路方向角为263°,呈现南北方向运动。
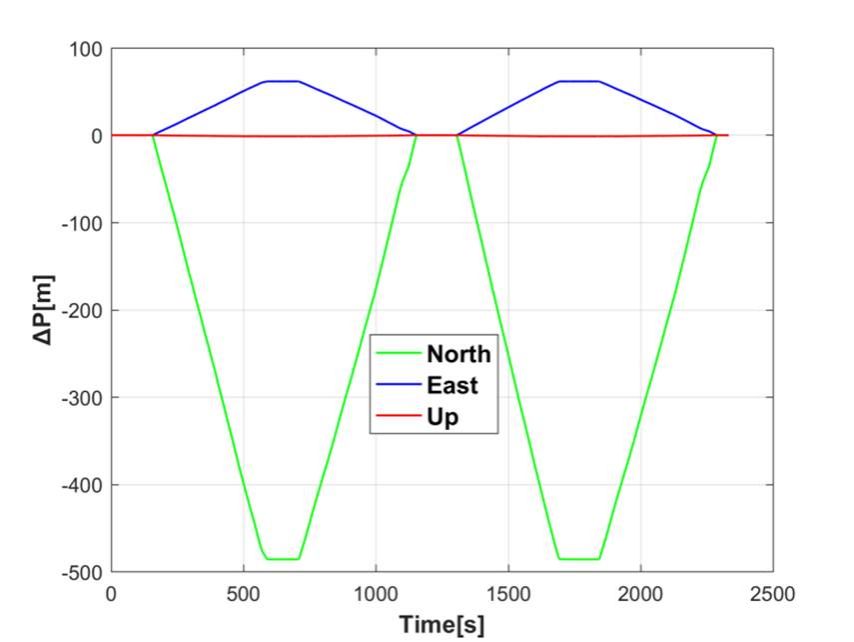
图 3.轨道不平顺测试线路
为了评估本研究多传感器系统的相对测量性能与绝对测量性能,将其与安装在小车车上的导航级FOG INS/RTK系统进行了比较。FOG INS/RTK系统提供定位精度为1mm,姿态精度为0.01。以导航级光纤惯导组合系统作为真值基准,通过分析本研究多传感器系统解算的姿态角、位置的自身重复性评估系统相对测量精度,与参考值的差异评估绝对测量精度。
相对测量精度:
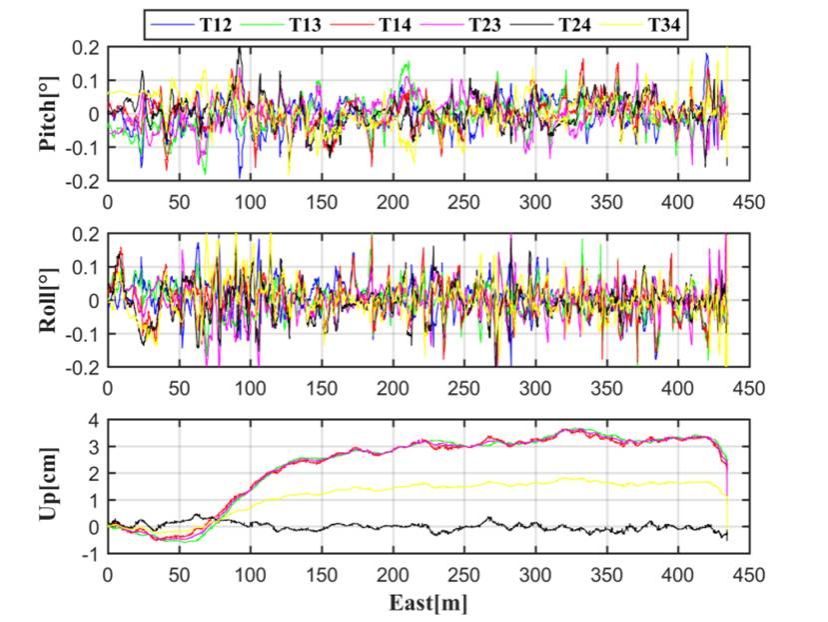
图 4.姿态角相对测量精度
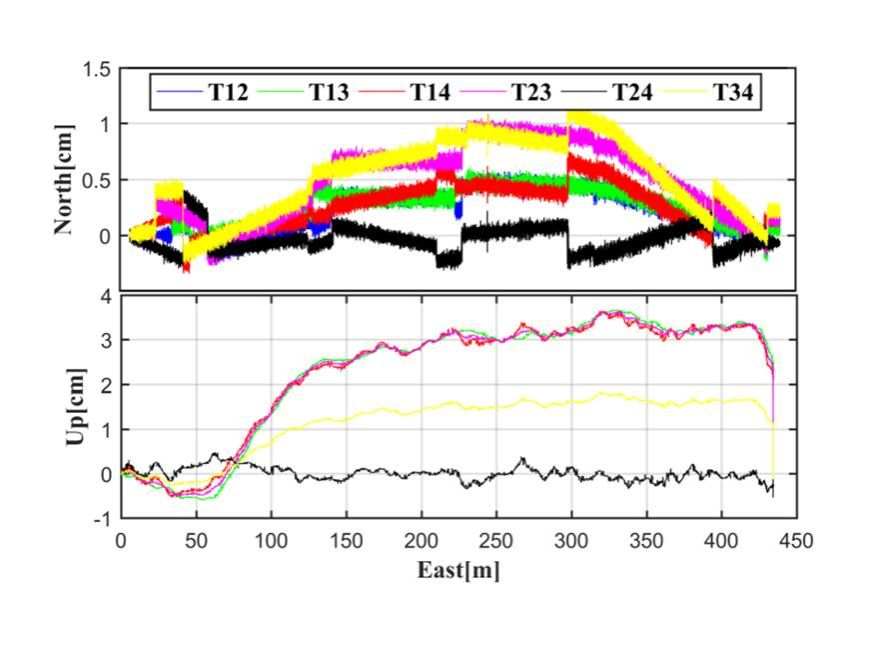
图 5.位置相对测量精度
绝对测量精度:
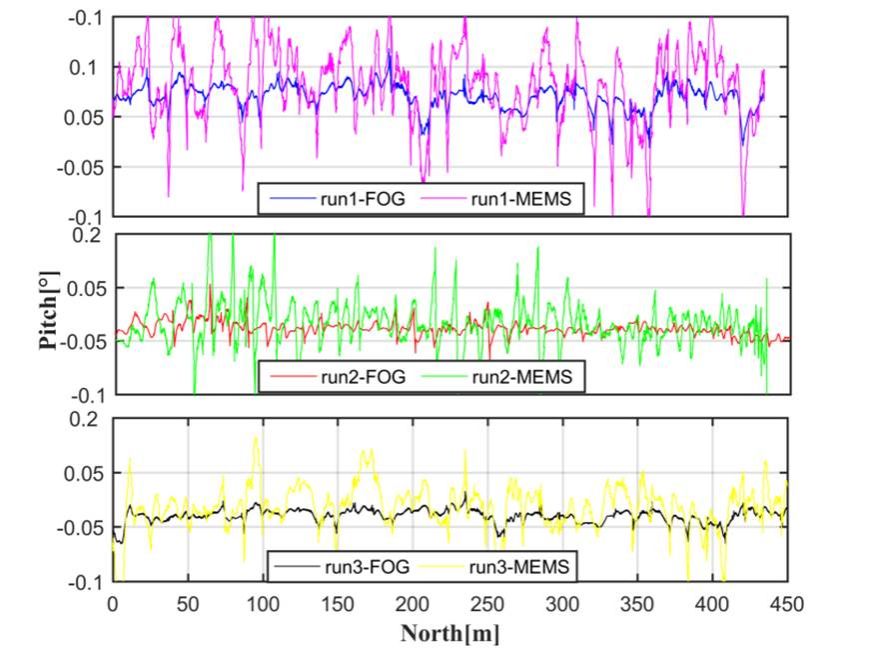
图 6.姿态绝对测量精度
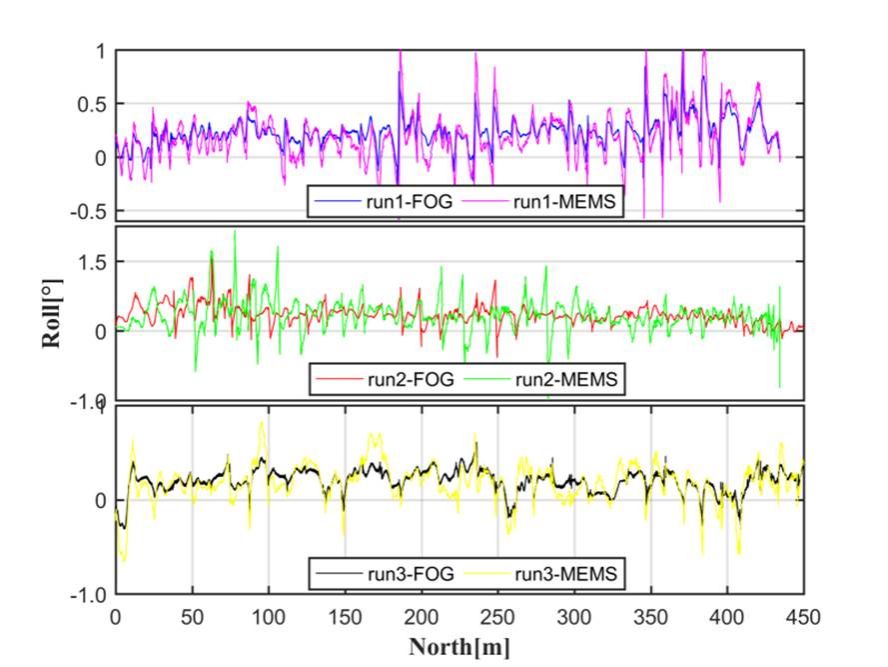
图 7.位置绝对测量精度
以瑞士Amberg绝对测量系统作为轨道不平顺测量参考值,通过多传感器融合后处理的各种指标(如姿态、位置和轨道测量重复性)、30米弦长的轨向、高低来评估本系统提供的轨距、水平、轨向和高低的不平顺相对测量精度。
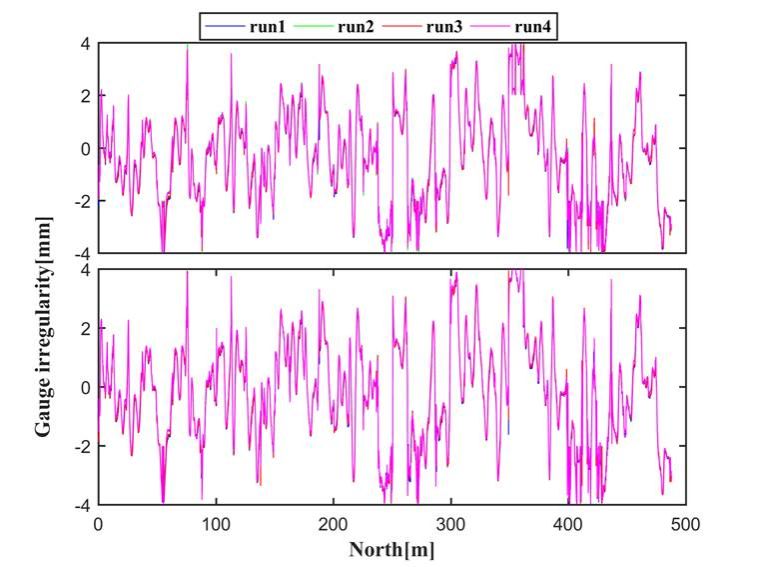
图 8.轨距不平顺性
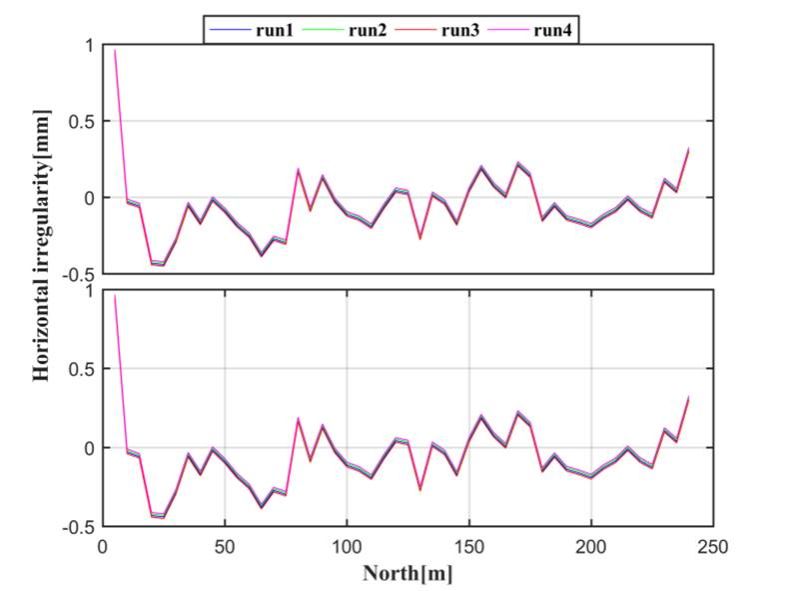
图 9.轨向不平顺性
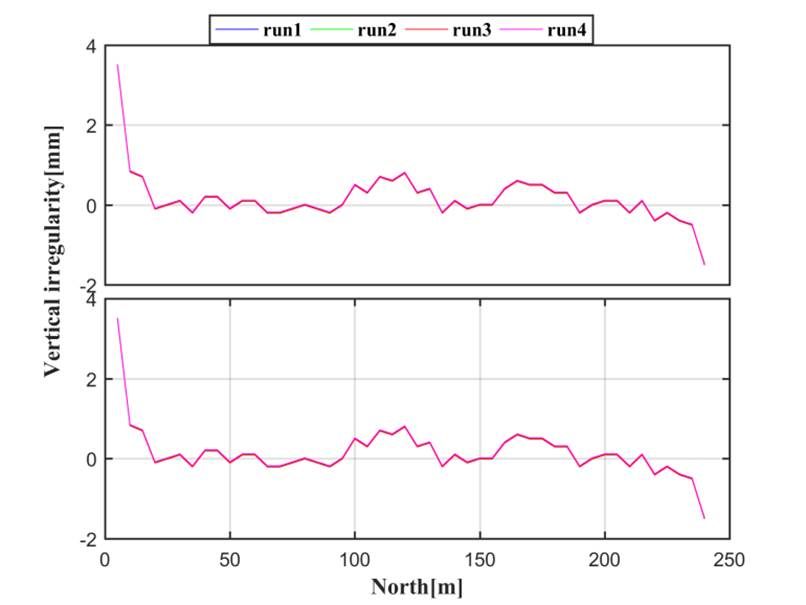
图 10.高低不平顺性
结论
本研究提出了一种多传感器融合系统,该系统集成了一个低成本的MEMS IMU,一个RTK GNSS,一个里程计和两个激光用于铁路轨道不平顺检测。首先,我们提供了数学概念和算法模型的全面解释。随后,我们在铁路线上推行一个装有多个传感器的轨道小车来收集运动数据。通过采用NHC、ZUPT、RTS和OC等辅助方法,对实验数据进行了彻底的分析和评估。基于实验数据分析结果1)多传感器融合系统可提高姿态精度25% ~ 76%,位置精度26% ~ 33%。2)系统的俯仰角相对测量精度为0.045°,横滚角相对测量精度为0.046;位置相对测量精度分别为0.303 cm和0.137 cm。与FOG INS/RTK系统相比,我们提出的基于MEMS IMU的器件的多传感器融合系统具有与其相当的相对测量精度,同时设备成本将显著降低到FOG系统的10%。
论文信息:
Y. Li, Q. Zhao, J. Guo, R. Fang and J. Zheng, "Multi-Sensor Fusion for Railway Irregularity Inspection System:Integration of RTK GNSS, MEMS IMU, Odometer, and Laser," in IEEE Transactions on Instrumentation and Measurement, doi: 10.1109/TIM.2023.3324683.



