

随着信息时代的来临,基于位置信息的服务在各种应用场景中扮演的角色愈加重要。室外开阔场景下,GNSS可以提供实时、可靠稳定的导航定位服务。但在城市环境,由于场景比较复杂,存在城市峡谷可见卫星数少、多路径效应、隧道等场景信号失锁等问题,导致定位精度较差,可靠性较低,难以满足全场景、实时、高精度、高可靠的定位需求。此外,在占人类日常生活时间80%的室内环境中,受到建筑物的遮挡和多径效应的影响,GNSS定位精度急剧降低,无法满足室内位置服务的需要。因此,多源融合定位技术被提出,其采用信息融合的方法将卫星导航定位、无线传感器定位以及其他辅助定位技术进行处理,最终获得可靠准确且稳定的定位服务。
团队开展了多源融合室内外定位方案的整体设计。在室内定位方面,实现了步态检测(PDR)辅助UWB的定位。在室外定位方面,针对基于低成本设备的导航场景,实现了步态检测(PDR)辅助RTK的定位;针对自动驾驶等高精度定位场景,搭建了含GNSS/INS/里程计(OD)/Version/LiDAR等多源传感器的定位实验平台,团队开展了基于扩展卡尔曼滤波与因子图优化的紧组合多源信息融合设计研究,通过充分挖掘多传感器信息(GNSS/INS/OD/Version/LiDAR),实现优势互补,满足自动驾驶、智能交通、精准农业与精密测绘等领域的高精度、高可靠性应用需求。

图1 GNSS/INS/OD/Version/LiDAR多源传感器融合定位实验平台
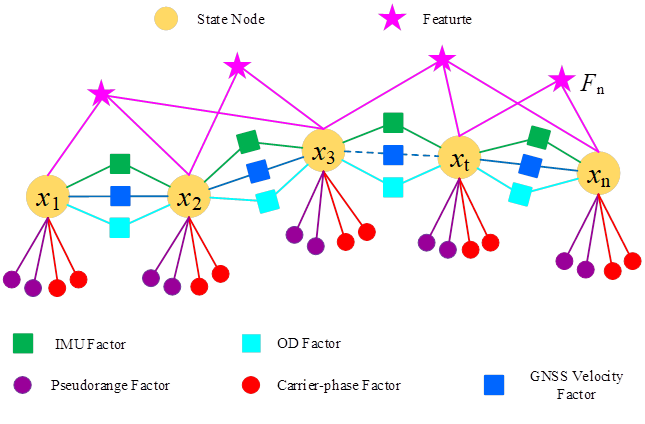
图2 GNSS/INS/OD/Version 因子图模型
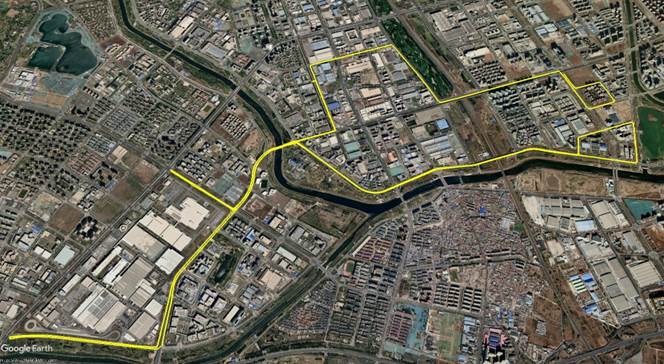


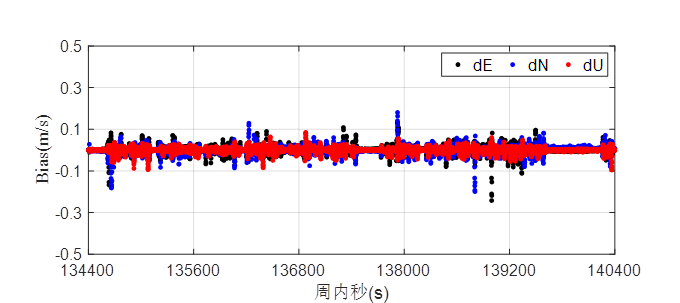
图3 实验路线以及融合定位和结果

